



 |
|
Application 316
Torque Sensors for Robot Joint Control
Application Summary
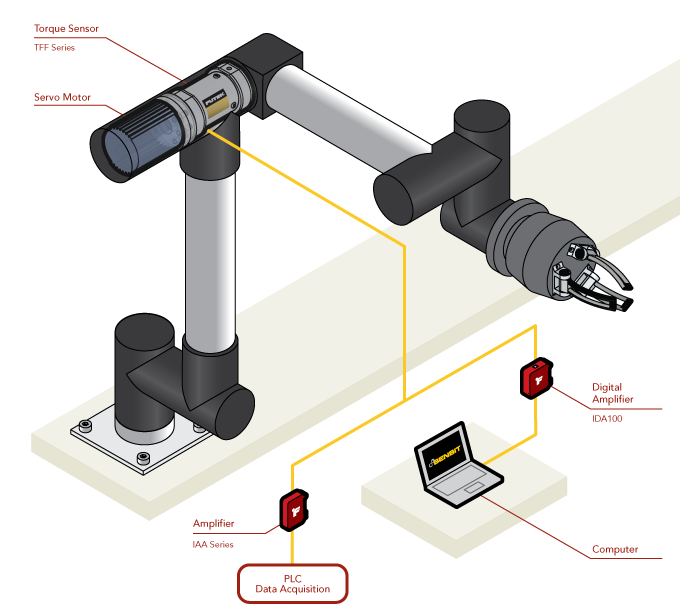
Versatile and adaptive robotic armatures have the benefit of increasing manufacturing productivity by automating and performing complex, repetitive tasks 24x7. These arms are often designed to be trainable or operate as a team as cooperative robots (cobot/co-robot). Driving these arms in their joints are servo or stepper motors. In addition to monitoring shaft position, these arms need to monitor torque output for smooth, steady motion. By combining these motors with a reaction torque sensor, control loops can be developed for smooth, autonomous operation.
Products in Use
A FUTEK TFF Series Reaction Torque Sensor with Thru Hole Center paired with FUTEK Amplifiers (IAA Series or IDA100). |
 |
|
How it Works

TFF SERIES
Reaction Torque Sensor with Thru Hole Center

IAA SERIES
Analog Amplifiers

IDA100
Digitally Configurable Amplifier
|



