



 |
|
Application 713
Fly By Wire Sensors
Application Summary
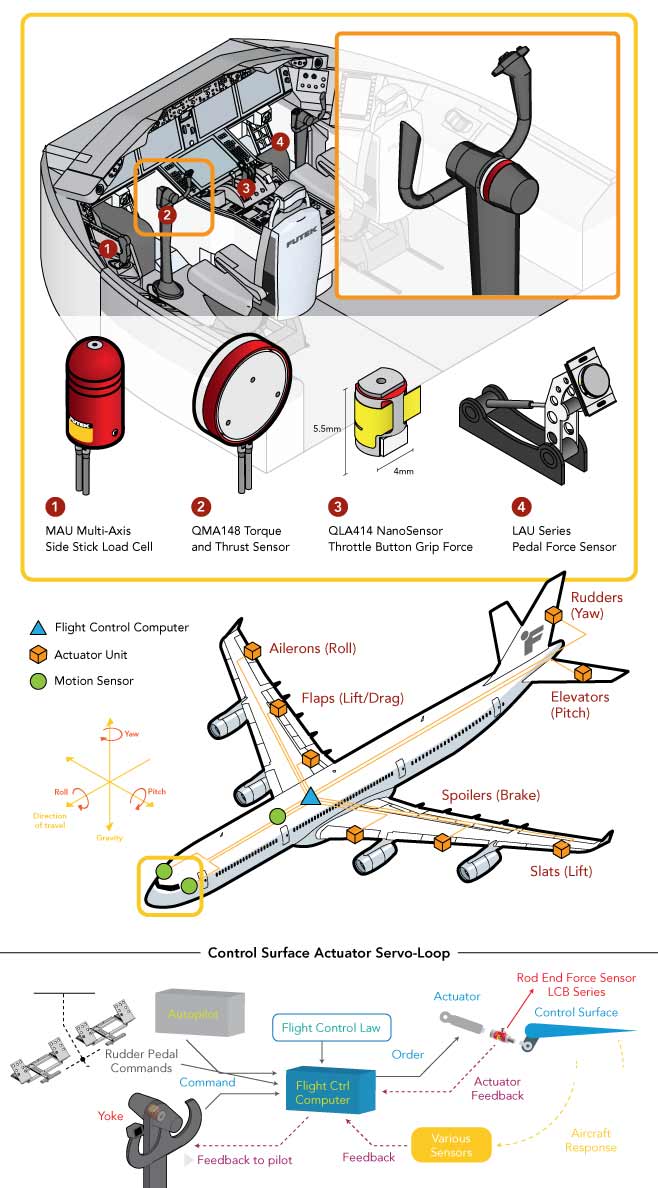
Fly By Wire is an automated flight control system that processes the command input made by either the pilot or autopilot and sends corresponding commands to the flight control surface actuators. This automated electronic arrangement replaces the traditional mechanical and hydraulic flight control systems (levers, rods, cables, and pulleys) for the pilot to remotely command the control surfaces. • The Flight Control Computer (FCC), which calculates how much the current aircraft aerodynamic variables deviates from the reference input and what action should be commanded to the actuators to maneuver the aircraft safely according to the flight control laws;
• The surface control actuators, which translates the FCC signal command into hydro-mechanical force/torque to change the position/angle of the surface controls (Rudder, Elevators, Slats, Spoilers, Flaps, and Aileron). They are directly responsible to - change the aircraft principal axis of rotation (Roll, Pitch, and Yaw);
How Force Sensors are used in FBW Systems? in the flight test environment to validate the control system design based on the flight control laws. LoadCells and multi-axis sensors are added to the control system during the verification and validation phase to verify and calibrate the fly-by-wire control loops parameters. Flight controls must be validated during the product design phase and require extreme auditing before in-flight use.
Products in Use
• MAU300 Gear Shift Load Cell • MBA500 Torque and Thrust Biaxial Sensor • QLA414 Nanosensor • LMD300 Pinch Force Sensor • LAU220 pedal force sensors • LCB400 Rod End Load Cell |
 |
|
How it Works
|



