|
What are Steer-by-Wire systems?
Traditionally, on-road and off-road automobile vehicles use a hydro-mechanical system for steering. The mechanical system is usually made up of a rack-and-pinion steering gear that is physically linked to the steering wheel.
In the ’80s and ’90s, power steering became popular and helped to reduce the amount of force necessary to turn the steering wheel. This was accomplished through a hydraulic actuator that assists the turning of the rack-and-pinion steering gear. Even with electric power steering, the biggest challenge is the limitations of the mechanical components.
Steer-by-Wire (SbW) or Drive-by-Wire (DbW) technology in the automotive industry is the use of electronics, actuators, and algorithms to replace hydraulic and mechanical connections between the hand steering wheel and the road. This technology replaces the traditional mechanical control systems with electronic control systems and this concept is very similar to the fly-by-wire systems widely used in the aviation industry.
How are Steering Torque Sensors used in Steer-by-Wire Systems?
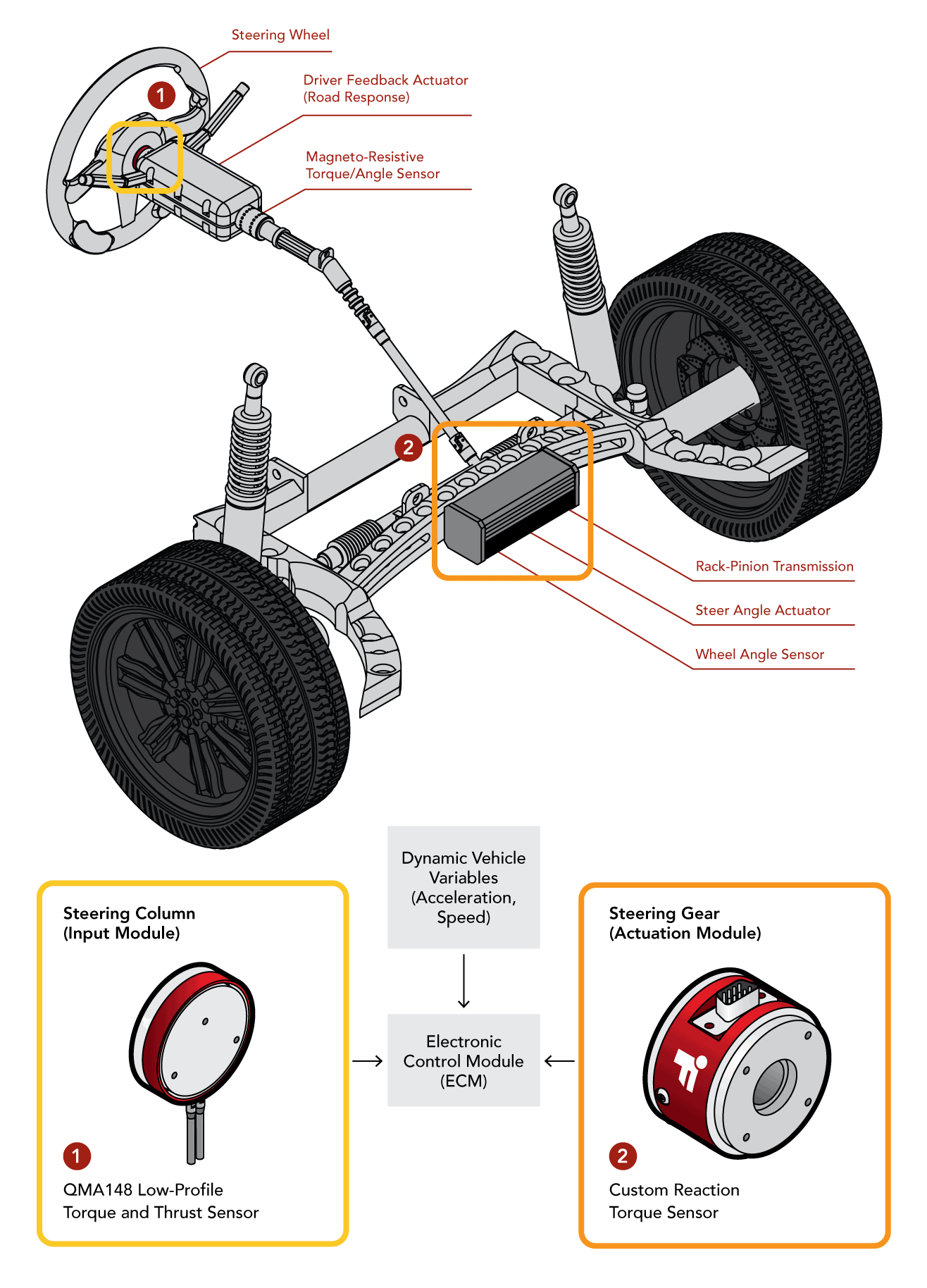
Multi Axis and reaction torque sensors are frequently utilized in the Steer-by-Wire test environment to validate the control system design. Torque sensors and multi-axis transducers are installed in the steering wheel (input module) and the rack-pinion transmission (actuation module) during the verification and validation phase to audit and calibrate the steer-by-wire control system (control loop parameters, actuators dynamic). Steer-by-Wire systems must be validated during the product design phase and require extreme auditing before being deployed to the commercial end product.
Car design engineers can take advantage of FUTEK's high-precision multi-axis torque sensor to audit and validate new designs of steer-by-wire systems as well as calibrate the feedback control systems.
|