|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Surgical Robot Sensors
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
What Sensors Do Surgical Robots Have?
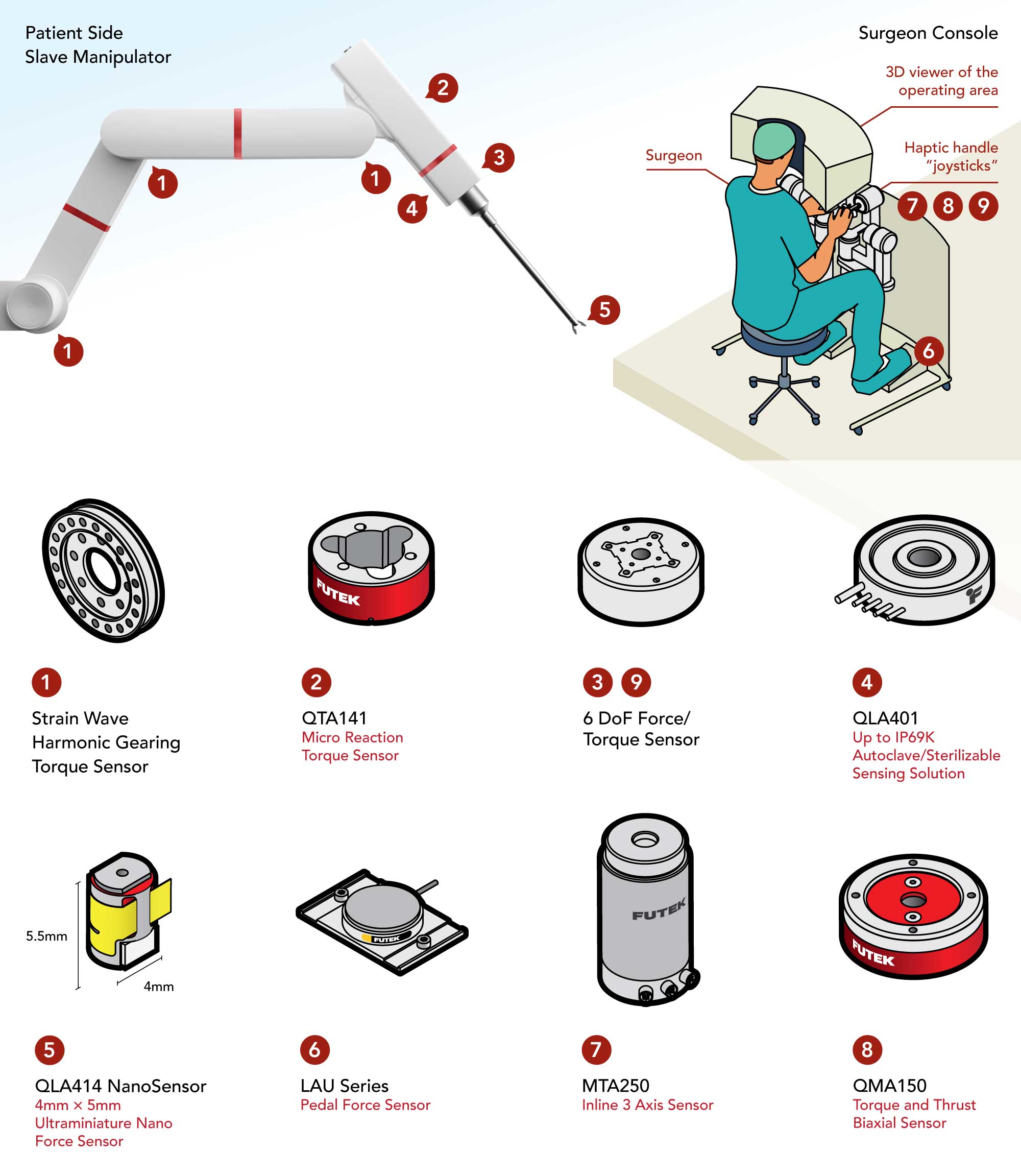
Surgical robotics refers to the advanced integration of technology in medical procedures, where surgeons utilize robotic systems to enhance precision and control. These systems often comprise one or more robotic arms with Surgical Robot Sensors that accurately measure forces, meticulously engineered to follow the surgeon’s commands thereby creating a closed-loop feedback control system. Operating remotely from a console situated in close proximity to the patient, surgeons manipulate these arms with very low latency that provides exceptional accuracy. The interface for these robotic arms incorporates a joystick-like those found in video games, ingeniously designed to replicate the movements of the human wrist and hand. This design grants unparalleled dexterity, allowing for movements that mimic the surgeon’s natural gestures, and transposing the surgeon’s eyes and hands into the patient’s surgical site in a reliable and effective way, thereby facilitating complex surgical tasks with improved outcomes.
FUTEK’s engineering team has deep expertise in designing and customizing force and torque sensors to overcome and meet the challenges robotic surgery presents. Explore how FUTEK’s expertise in force and torque sensors is utilized in major surgical robotics systems, answering the question: “What Sensors Do Surgical Robots Have? |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
How it Works
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||
| Mounted directly onto a brushless DC motor and its mounting points, the motor power can be controlled based on the torque closed-loop feedback on the torque measurement, providing dynamic feedback, precise control of the power that is used, ensuring smooth movement and enhancing robotic platform dexterity, a key parameter for robotic learning. | |||||||||||||||||||||||||||||||||||||||||||||||||
Surgical Instruments3 and 9) 6 DoF Force-Torque Sensor
Force-torque transducer measures up to 6 different forces (Fx, Fy, Fz) and torque (Mx, My, Mz), in 3 spatial directions including translational motion, fulcrum point motion, and the surgical instrument’s rolling motion necessary to achieve the level of precision and dexterity of instrument tips with surgical instruments. This 6 DoF sensor is particularly important in complex surgical procedures such as measuring the interaction forces between the tissue and laparoscopic instrument where holding a steady position and precision motion control is necessary. 4) QLA401 Autoclavable Sensor
This monolithic hermetically sealed, low-profile autoclave through-hole load cell is designed to withstand the autoclave sterilization process of high temperature and high pressure while maintaining original specifications to incorporate force and torque measurements into sterile medical equipment which brings tactile and closed feedback critical on reusable tooling used in surgical robots. It has an IP69K rating, the highest protection against ingress of dust, liquids, and steam jets, meaning that it can withstand almost any harsh condition as well as over a thousand autoclave sterilization cycles. 5) QLA414 Nano Sensor
QLA414 4mm x 5mm Nano sensor is the smallest tension and compression force measurement solution of its kind (micro-miniature in-line load cell) ideal for surgical robotics and well suited for haptics force feedback robotic surgery. Due to its miniscule size (4x5 mm), ability to measure both tension and compression forces with high precision (±0.5% nonlinearity of rated output (RO) in 5lb and 10lb capacities), and unique mounting flexibility (M1 threaded double-sided mounting provisions, it helps engineers and surgeons overcome technical obstacles in designing and manufacture of a haptic feedback sensor for robotic surgery instruments. B. Surgeon Console Master Controls/ManipulatorsFoot Pedal6) LAU Series Pedal Force Sensor
From its 17-4PH Stainless-Steel one-piece construction to its low profile design (Off-center loading error of <4%), this sensor offers a great force measurement system with impressive tolerances that is an ideal solution to measure the load applied to foot pedals in the foot switch panel in a surgeon console of a robotic surgery which the surgeon uses for effective controls such as robotic arm swapping, master clutching, instrument activation and camera controls. Hand Joystick (Gimbal)7, 8 and 9) Multi-Axis Sensors Muti-axis Surgical Robot Sensors that measure up to 6 different forces (Fx, Fy, Fz) and torque (Mx, My, Mz), in 3 spatial directions and convert it into an electrical output signal is an ideal measurement solution to have the robotic arm/hand become an extension of a surgeon and translate the surgeon’s movements of their hands into the patient. These special force torque sensors are equipped with multiple strain gage bridges that accurately measure the forces and torques applied in one direction with little or no crosstalk interference from force or moments applied in other directions which is particularly important in precision motion control, holding a steady position, and improves end effector dexterity in robotic surgery. |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Products in Use
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||


LAU200-PEDAL-FORCE-SENSOR-1_THUMB.jpg)