








































 |
|
Application 145
Laparoscopic Tool Calibration
Application Summary
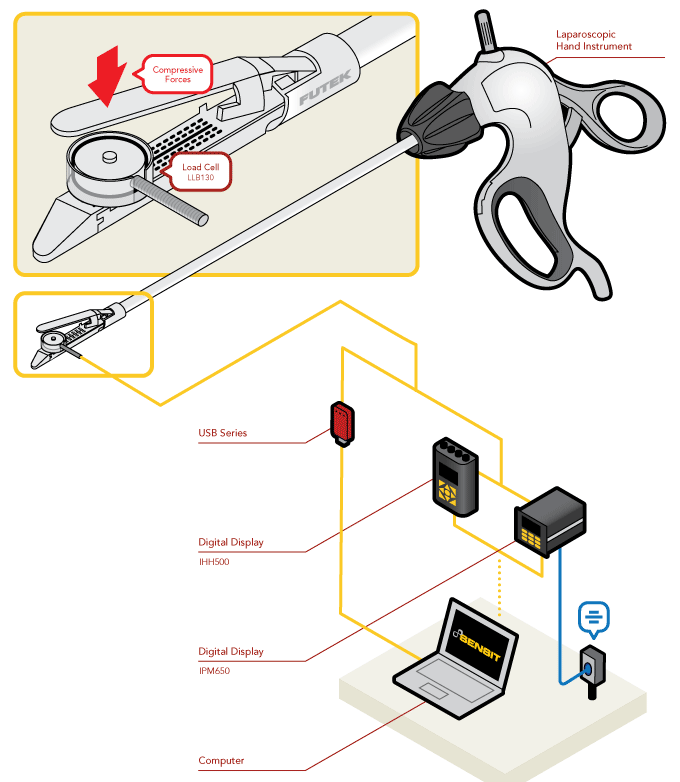
Minimally Invasive Surgery (MIS) and Single Port Access Surgery (SPAS) have dramatically reduced the risk and recovery time for patients for undergoing tumor extraction, heart valve and artery repair, and in-vitro fertilization. Whether performed with a robotic surgical system or with the trained hands of a surgeon, precision instrumentation is required to work with the delicate tissues of the patient while providing a precise, secure grip without exerting excess force. The forces applied with robotic instrumentation must be calibrated so that visual and haptic feedback mechanisms report the correct applied forces during surgery. Handheld instrumentation requires verification of the applied forces so the tactile sensations felt by the surgeon are predictable and consistent. Here we will demonstrate the verification and calibration of the jaws of a laparoscopic instrument.
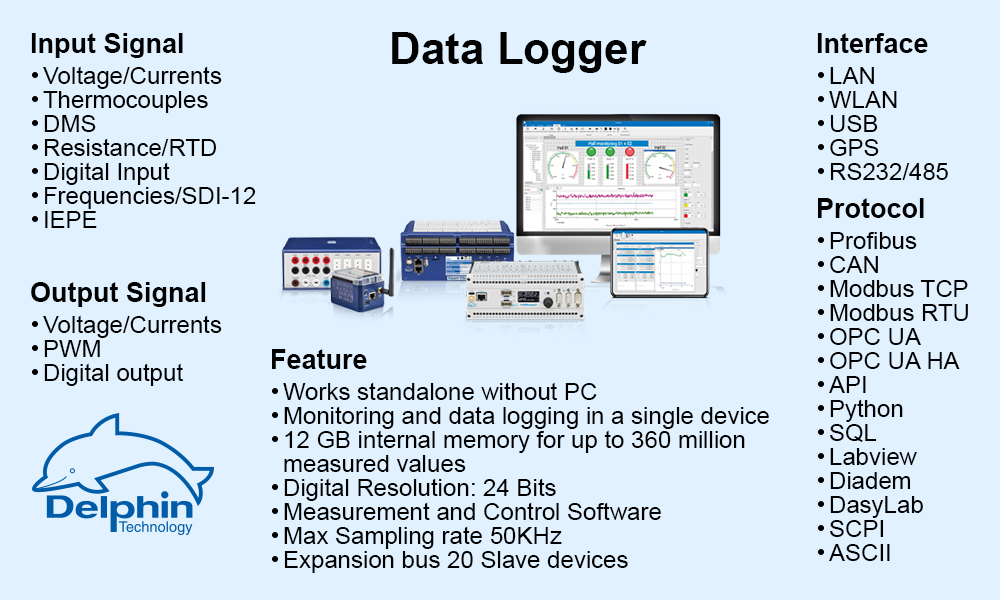
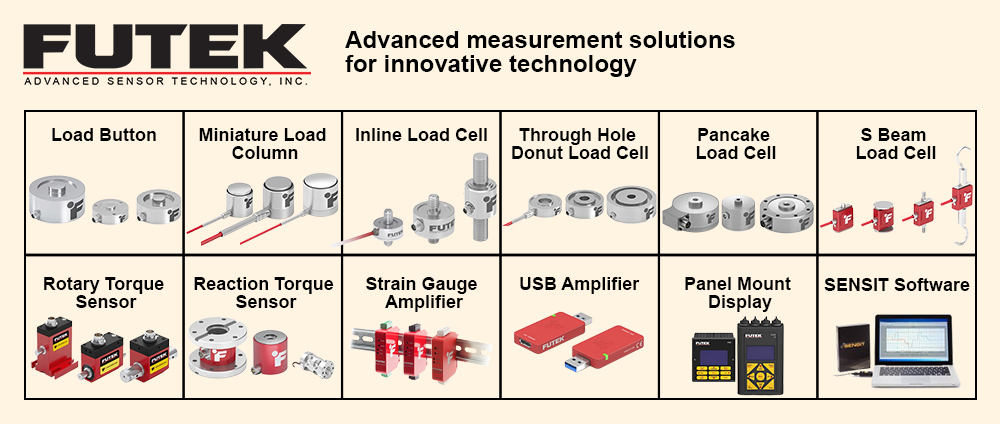
Products in Use
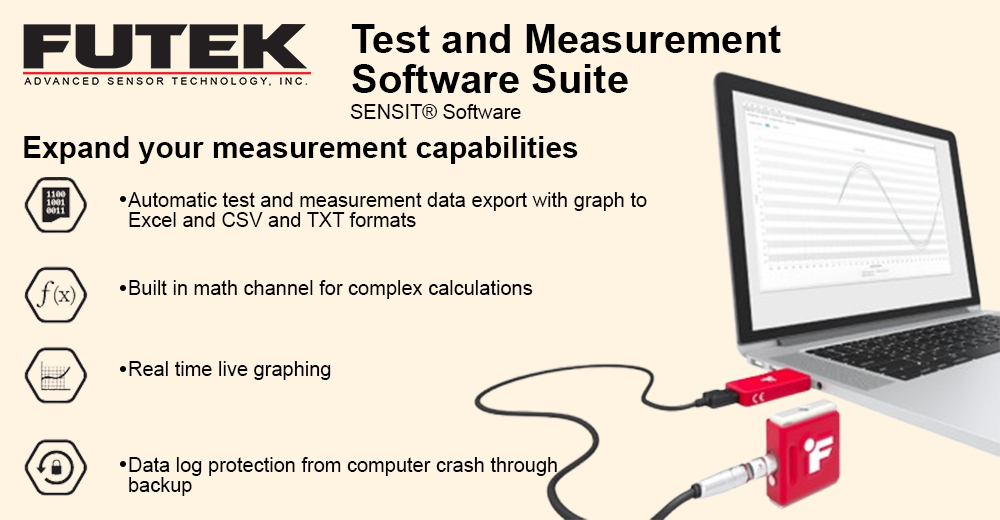
Miniature Load Button (LLB Series) paired with Instrumentation (IPM650, IHH500, or USB Solutions) and SENSIT™ Test and Measurement Software. |
 |
|
How it Works

LLB SERIES
Miniature Load Button

QLA368
Custom Tension and Compression

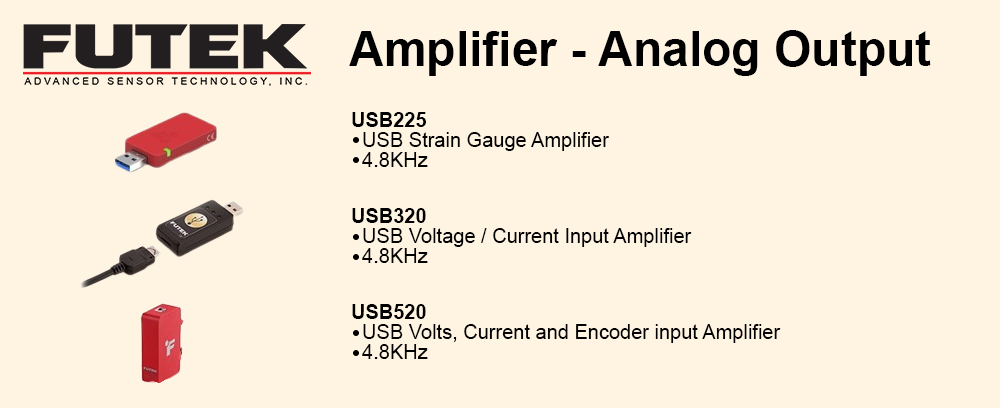
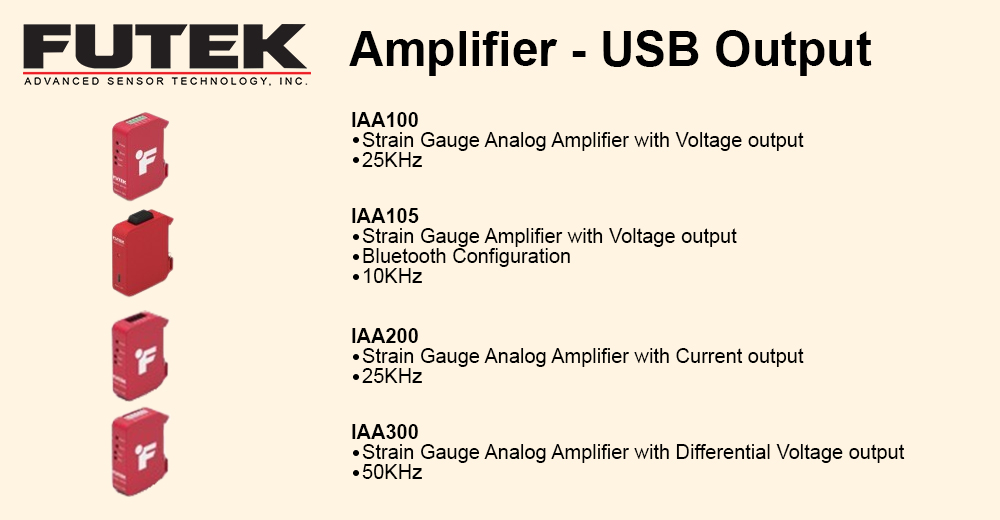
USB SOLUTIONS
Load Cell With Digital Output

IHH500
High Resolution USB Output Module

IPM650
Intelligent Digital Hand Held Display

SOFTWARE
Panel Mount Display
|